



Description
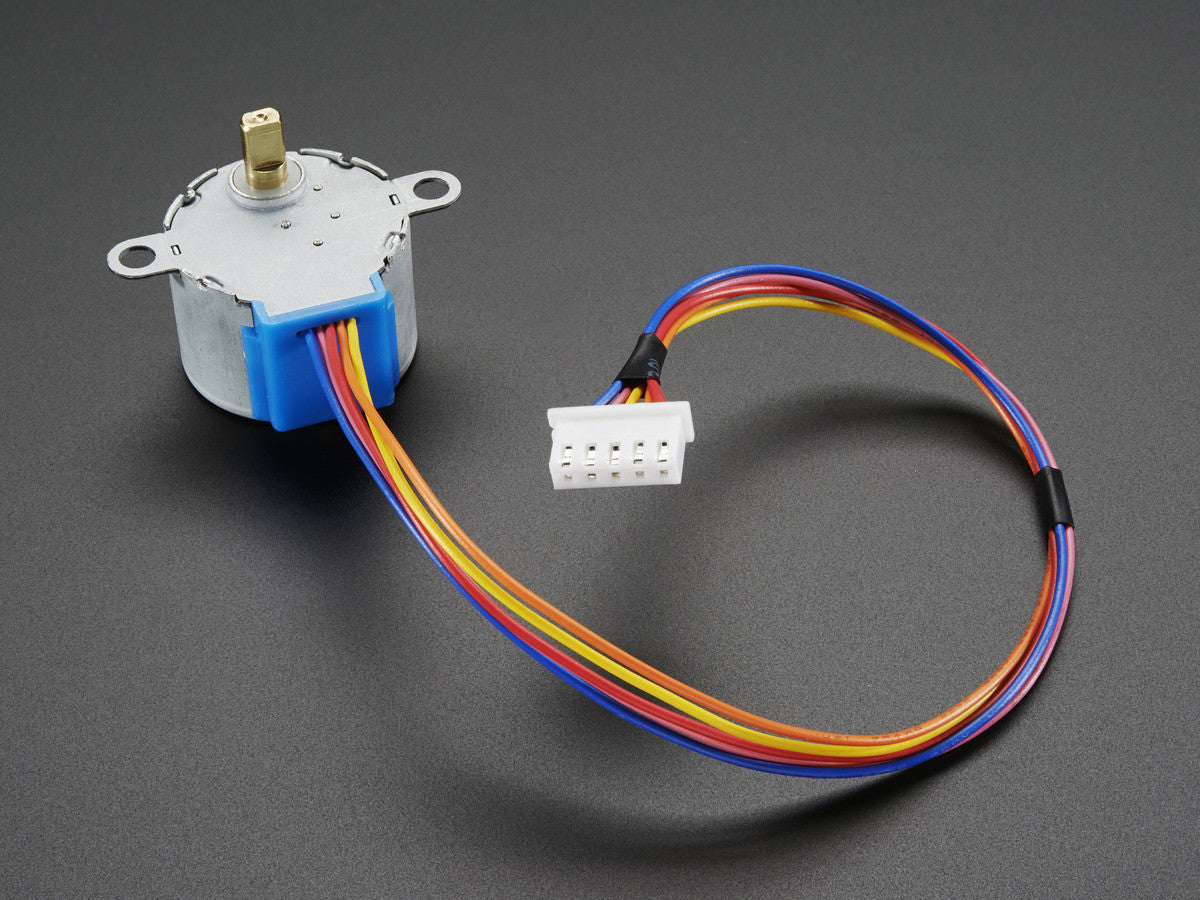
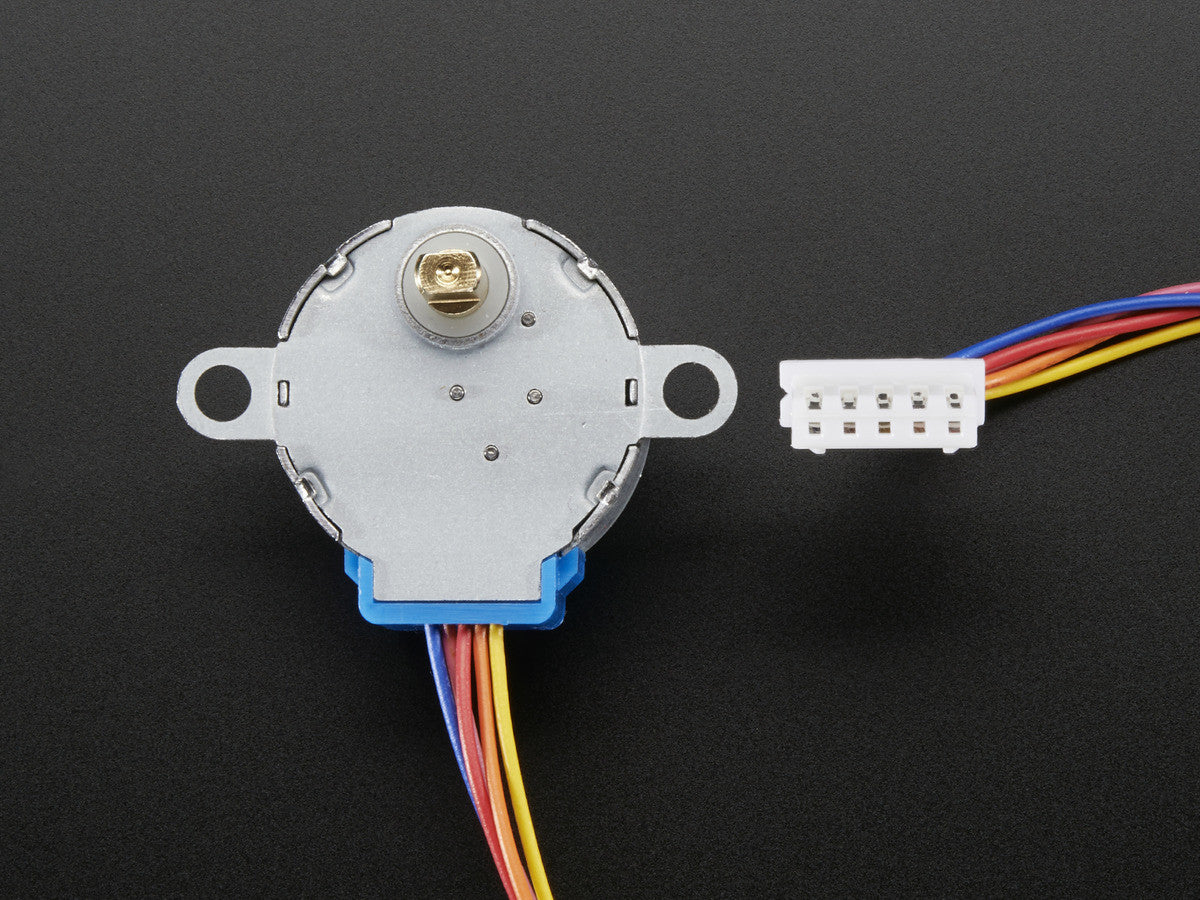
This is a great first stepper motor, good for small projects and experimenting with steppers. This uni-polar motor has a built in mounting plate with two mounting holes. There are only 32 step (11.25 degree) per revolution, and inside is a 1/16 reduction gear set. The shaft is flattened so its easy to attach stuff to it with a set-screw. A perfect first stepper motor and works well with the Motor Shield for Arduino.
The gearing has a few side effects which are important to note. First, you can turn the stepper by hand but not as smoothly as an un-geared stepper. It also means you shouldn't use interleaved or micro-stepping to control or it will take forever to turn. Instead use single or double stepping. The torque is fairly high but its slower than un-geared steppers - we maxed out at about 80 RPM when powering with 12VDC and about 50 RPM on 9VDC.
.
The gearing has a few side effects which are important to note. First, you can turn the stepper by hand but not as smoothly as an un-geared stepper. It also means you shouldn't use interleaved or micro-stepping to control or it will take forever to turn. Instead use single or double stepping. The torque is fairly high but its slower than un-geared steppers - we maxed out at about 80 RPM when powering with 12VDC and about 50 RPM on 9VDC.
.
- Unipolar stepper with 0.1" spaced 5-pin cable connector
- Connection cables
- 32 steps per revolution
- 1/16.025 geared down reduction
- 5V-12V DC suggested operation
- Weight: 37 g.
- Dimensions: 28mm diameter, 20mm tall not including 9mm shaft with 5mm diameter
- 9" / 23 cm long cable
- Holding Torque @ 12VDC: 250 gram-force*cm, 25 N*mm/ 3.5 oz-force*in
- Shaft: 5mm diameter flattened
- Arduino Stepper library
- Some helpful schematics:

